Zašto su master studije iz IT-ja pravi izbor za vašu sledeću profesionalnu odluku?
Činjenica da automobili mogu komunicirati na različite načine zahvaljujući veštinama verbalne i neverbalne komunikacije vozača odavno je poznata i prihvaćena, ali … mnogo je značajnije što oni mogu samostalno da komuniciraju sa ostalim učesnicima u saobraćaju. Može se reći da već sada automobili imaju sposobnost samostalnog odlučivanja u pojedinim situacijama.
Razvoj aplikacija koje će unaprediti bezbednost i sigurnost učesnika u saobraćaju smatra se novim talasom tehnoloških aktivnosti. Komunikacija između automobila i eksternih “uređaja” može se posmatrati kroz nekoliko oblika interakcije:
- V2I / I2V (Vehicle-to-Infrastructure and vice versa) – Sistem dvosmerne komunikacije između prevoznih sredstava i infrastrukture. Obuhvata pristup informacijama o stanju na putevima, naplatnim rampama, internet sadržajima, protoku podataka na bežičnim internet mrežama, servisima koji pružaju pomoć na putu.
- V2R / R2V (Vehicle-to-Road and vice versa) – Sistem dvosmerne komunikacije između prevoznih sredstava i drumske infrastrukture. Obuhvata komunikaciju između vozila i eksternih uređaja kao što su saobraćajni znaci, elektronski sistemi naplate, oprema za signalizaciju koja se primenjuje u hitnim slučajevima.
- V2V (Vehicle-to-Vehicle) – Sistem dvosmerne komunikacije između samih prevoznih sredstava. Obuhvata informacije o brzini kretanja vozila, različitim sadržajima koji se odnose na određenu marku automobila, vanrednim situacijama koje mogu nastati tokom vožnje.
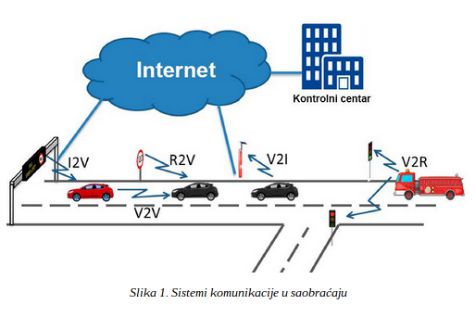
Osnovna razlika između V2R/V2I i R2V/I2V sistema komunikacije prikazana je na slici 1. Koji je od sistema zastupljen zavisi od toga da li je proces razmene informacija ograničen samo na proces komunikacije između vozila, ili se komunikacija odvija između vozila i drugih izvora koji se nalaze na putevima i saobraćajnicama.
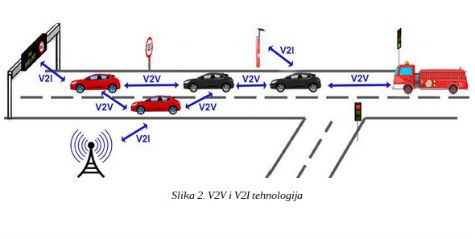
V2V i V2I predstavljaju ključne delove inteligentnih transportnih sistema. Iako se primenjuju za rešavanje različitih problema koji mogu nastati na putevima, V2V i V2I se međusobno dopunjuju. V2V omogućava komunikaciju između vozila bez direktnog oslanjanja na fiksnu komunikacionu infrastrukturu, a V2I omogućava vozilu da komunicira sa ostalim “uređajima” na putu (semafori, uređaji za signalizaciju) (slika 2). V2V sistemi imaju za cilj da podignu stepen bezbednosti vozača na viši nivo i da spreče mogućnost nastanka saobraćajne nesreće. Zahvaljujući podacima koje prikupljaju iz različitih izvora, automobili su u mogućnosti da procene stepen rizika na putu, ukažu vozačima na moguće probleme, i po potrebi automatski aktiviraju kočione i bezbednosne sisteme. V2V sistem prosleđuje informacije o trenutnoj poziciji i brzini kretanja svakog vozila svim ostalim učesnicima u saobraćaju putem bežične mreže.
U okviru R2V sistema postoje dva tipa aplikacija: aplikacije visokog rizika i aplikacije niskog rizika. Cilj aplikacija visokog rizika je da spreče nastanak sudara ili da, s druge strane, svedu štetu na minimum. Ove aplikacije zahtevaju od vozača hitne reakcije i aktivno učešće u saobraćajnim dešavanjima. Za razliku od njih, aplikacije niskog rizika ne zahtevaju od vozača hitne reakcije, a njihova osnovna uloga je da vozačima dostave informacije o vremenskim prilikama i uslovima na putu, stepenu vidljivosti, izmenama u saobraćaju zbog radova koji se izvode i drugo.
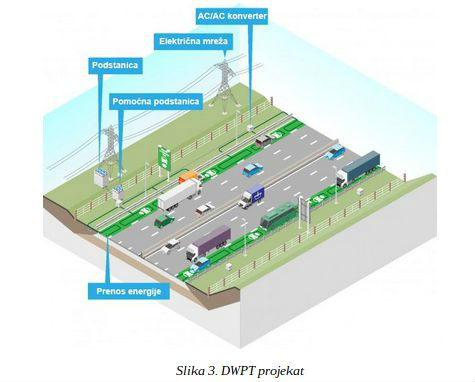
Na bezbednost u saobraćaju odgovornost se delom prebacuje i na sam put, tj. kolovoz. Poslednje studije koje sprovode evropske službe za saobraćaj bavile su se ovim pitanjima i prilagođavanju saobraćajne mreže električnim automobilima. Za vozače električnih automobila i dalje značajan problem predstavlja činjenica da nije svaka benzinska stanica u mogućnosti da im omogući dopunu baterije koja pokreće automobil, s tim da ni vremenski period punjenja baterije nije kratak. DWPT (Discrete Wavelet Packet Transform) projekat, prikazan na slici 3, pokrenut je u Engleskoj i nalazi se u fazi testiranja. Cilj projekta je da se električni automobili na autoputu kreću kolovoznom trakom koja ima funkciju Wi-Fi punjača i omogućava punjenje baterije bez zaustavljanja vozila.
Autor: dr Marko Vulić
Povezane vesti